近日,必威教师汪婧博士在国际权威会刊《IEEE Transactions on Cybernetics》上发表了强化学习智能控制领域最新的研究成果。《IEEE Transactions on Cybernetics》是中科院大类一区top期刊,影响因子为19.118,是中国自动化学会推荐的A类权威期刊,是控制和系统科学领域的国际顶级学术期刊(CiteScore 排名: 2 / 270)。我校为论文第一单位,必威教师汪婧博士为论文第一作者和通讯作者,该工作得到国家自然科学基金等项目的资助。
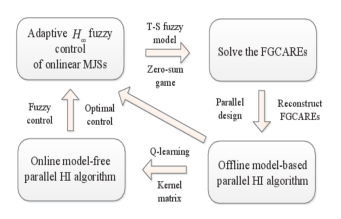
(研究问题的整体框架图)
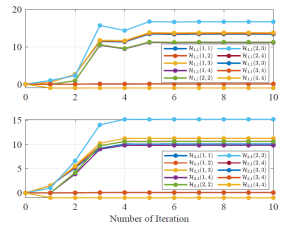
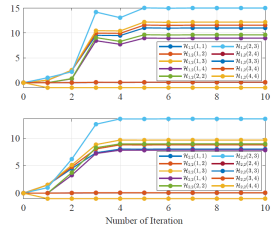
(核矩阵迭代学习收敛过程)
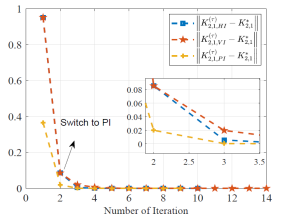
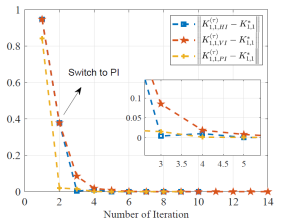
(不同迭代学习机制下控制增益收敛对比图)
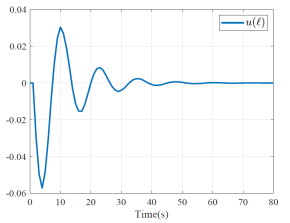
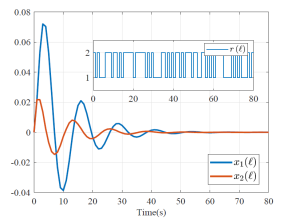
(闭环系统状态轨迹图和控制输入轨迹图)
人工智能是新一轮科技革命和产业变革的重要驱动力量。强化学习作为一种以环境反馈作为输入的、特殊的、适应环境的一种机器学习方法是人工智能的核心问题之一。目前,强化学习方法已经在非线性控制、机器人控制、组合优化和调度等领域取得了成功的应用。本研究以强化学习控制理论为依据,设计了一种新的混合并行Q-学习控制方法,通过建立Takagi-Sugeno模糊系统和重构耦合黎卡提方程技术,构建并行混合迭代机制进行在线学习,利用系统运行产生的数据解决了离散时间非线性复杂跳跃系统的最优控制问题。
本研究所提出的方法,放松了需要初始可容许控制策略的要求,解决了在系统模型未知的情况下初始稳定控制器难以获取的问题。同时,相比于现存的值迭代控制方法具有较快的收敛速度,进一步提高了算法的实用性。该研究工作可为系统科学学科发展提供新的支撑,也对智能强化学习控制策略在无人系统、工业互联网以及新一代信息技术等战略新兴产业中的应用提供科学依据。
论文链接:https://ieeexplore.ieee.org/document/9961931









